AI记事·2026
年初,各大LLM厂商发布了新版本... 大多声称水平接近claude 4.5 其中DeepSeek仍保持其降本增效的路线,推出了DeepSeek-V3.2,专注于长文本处理,定价更具竞争力。
| 维度 | 领先者 | Claude 4.5 表现 |
| ------------- | ---------------------------- | ------------------------------------------------- |
| **原始推理/数学能力** | **Gemini 3 Pro** | 中等(24.1% vs Gemini 37.5% on Humanity's Last Exam) |
| **代码质量与工程** | **Claude 4.5 Sonnet** | 🏆 **77.2% SWE-bench Verified** 领先 |
| **创意写作** | **Claude 4.5 Sonnet** | 🏆 "最有灵魂的写作",情感共鸣最强 |
| **成本效益** | **DeepSeek-V3.2** | 中等(\$3/\$15 per million tokens) |
| **安全与可靠性** | **Claude 4.5 Sonnet** | 🏆 幻觉率仅0.8%,拒绝率98% |
| **多模态/视频** | **Gemini 3 Pro** | 较弱 |
| **长上下文** | **Gemini 3 Pro** (1M tokens) | 200K tokens |
|
在年会上,武术机器人表演了太极拳,剑术,震撼了全世界!
之后,该款机器人被一抢而空,全世界彻底拉开机器人时代的序幕...
|
|
| 序号 | 重要内容 | 核心要点 |
| :-: | :--------------- | :-------------------------------------------------------------- |
| 1 | **"十五五"时期定位** | 是基本实现社会主义现代化夯实基础、全面发力的关键时期,要推动经济社会高质量发展,为现代化奠定更加坚实的基础 |
| 2 | **经济社会发展指导思想** | 全面贯彻习近平新时代中国特色社会主义思想,以中国式现代化全面推进中华民族伟大复兴,坚持以经济建设为中心,以推动高质量发展为主题 |
| 3 | **2025年经济工作总要求** | 实施更加积极有为的宏观政策,着力稳就业、稳企业、稳市场、稳预期,推动经济实现质的有效提升和量的合理增长,实现"十五五"良好开局 |
| 4 | **宏观政策取向** | 继续实施更加积极的财政政策和适度宽松的货币政策,强化改革举措与宏观政策协同,建设强大国内市场,加快高水平科技自立自强 |
| 5 | **重点任务部署** | 持续扩大内需、优化供给,因地制宜发展新质生产力,纵深推进全国统一大市场建设,更大力度保障和改善民生,加快推动全面绿色转型 |
原文
中共中央政治局2月27日召开会议,讨论国务院拟提请第十四届全国人民代表大会第四次会议审查的中华人民共和国国民经济和社会发展第十五个五年规划纲要草案稿和审议的《政府工作报告》稿。中共中央总书记习近平主持会议。会议指出,“十四五”时期我国发展历程极不寻常、极不平凡。面对错综复杂的国际形势和艰巨繁重的国内改革发展稳定任务,以习近平同志为核心的党中央团结带领全党全国各族人民迎难而上、砥砺前行,经受住世纪疫情严重冲击,有效应对一系列重大风险挑战,推动党和国家事业取得新的重大成就。经过5年持续奋斗,“十四五”规划主要目标任务胜利完成,我国经济实力、科技实力、综合国力跃上新台阶,中国式现代化迈出新的坚实步伐,第二个百年奋斗目标新征程实现良好开局。会议认为,“十五五”时期是基本实现社会主义现代化夯实基础、全面发力的关键时期。在党中央领导下科学编制实施“十五五”规划纲要,努力巩固拓展优势、破除瓶颈制约、补强短板弱项,对于推动我国经济社会高质量发展,为基本实现社会主义现代化奠定更加坚实的基础,具有重大意义。会议强调,推动“十五五”时期经济社会发展,必须全面贯彻习近平新时代中国特色社会主义思想,深入贯彻党的二十大和二十届历次全会精神,认真落实四中全会部署,围绕全面建成社会主义现代化强国、实现第二个百年奋斗目标,以中国式现代化全面推进中华民族伟大复兴,统筹推进“五位一体”总体布局,协调推进“四个全面”战略布局,统筹国内国际两个大局,完整准确全面贯彻新发展理念,加快构建新发展格局,坚持稳中求进工作总基调,坚持以经济建设为中心,以推动高质量发展为主题,以改革创新为根本动力,以满足人民日益增长的美好生活需要为根本目的,以全面从严治党为根本保障,推动经济实现质的有效提升和量的合理增长,推动人的全面发展、全体人民共同富裕迈出坚实步伐,确保基本实现社会主义现代化取得决定性进展。会议要求,在“十五五”规划纲要草案提交十四届全国人大四次会议审查和全国政协十四届四次会议讨论过程中,要发扬民主、集思广益,广泛凝聚共识。会议指出,做好今年政府工作,要在以习近平同志为核心的党中央坚强领导下,以习近平新时代中国特色社会主义思想为指导,深入贯彻党的二十大和二十届历次全会精神,认真落实党的二十届四中全会和中央经济工作会议部署,完整准确全面贯彻新发展理念,加快构建新发展格局,着力推动高质量发展,坚持稳中求进工作总基调,统筹国内国际两个大局,更好统筹发展和安全,实施更加积极有为的宏观政策,增强政策前瞻性针对性协同性,持续扩大内需、优化供给,做优增量、盘活存量,因地制宜发展新质生产力,纵深推进全国统一大市场建设,持续防范化解重点领域风险,着力稳就业、稳企业、稳市场、稳预期,推动经济实现质的有效提升和量的合理增长,保持社会和谐稳定,实现“十五五”良好开局。会议强调,要继续实施更加积极的财政政策和适度宽松的货币政策,强化改革举措与宏观政策协同。要着力建设强大国内市场,加紧培育壮大新动能,加快高水平科技自立自强。持续深化重点领域改革,进一步扩大高水平对外开放,扎实推进乡村全面振兴,推动新型城镇化和区域协调发展。更大力度保障和改善民生,加快推动全面绿色转型,加强重点领域风险防范化解和安全能力建设。要加强政府自身建设,牢固树立和践行正确政绩观。
|
|
- 2026年初(2月底3月初),claude被迫向 ...开放全部权限 之后,整个LLM行业都陷入了...之中...
- 之前claude坚持了一段时间的对人权的维护
|
|
|
这份关于OpenClaw(AI智能体)生态的深度调研,通过分析200多个项目的营收数据,揭示了当前“养龙虾”热潮背后的真实财富密码。核心结论是:**在淘金热中,最赚钱的不是淘金者,而是卖铲子的人。**
以下是原文内容的详细总结摘要与核心数据表格。
### 一、 内容摘要
1. **生态定位**:OpenClaw是一个能像人类一样操作电脑(整理文件、发邮件、写代码等)的AI助理,因其图标是红色龙虾,故被戏称为“养龙虾”。其火爆程度已引起大众(甚至作者母亲)的广泛关注。
2. **核心发现:卖铲子的人最赚钱**
* **数据支撑**:Top5营收项目(ClawMart、OpenClaw Pro、Roofclaw、Donely、SetupClaw)占据了生态总营收的60%左右。
* **业务本质**:这5个项目没有一个是在开发具体的AI应用,全部都在解决“**如何用上、用好OpenClaw**”这个问题。它们提供的服务包括:配置模板、一键部署、预装硬件、云端托管、上门部署。
3. **市场格局分析**
* **头部未固化**:Top3项目(6.9万、5万、4.95万美元)营收差距小,新入局者仍有机会冲击第一梯队。
* **细分赛道机会**:除了通用部署服务,**垂直领域**(如游艇运营的SAM)和安全/成本管控(如Clawcti、ZeroRules)等项目也开始崭露头角,说明市场正在走向成熟,用户开始关注专业性和成本问题。
4. **普通人的入局建议**
* **谨慎入局**:技术门槛不低,且头部效应明显,单纯模仿成功项目机会渺茫。
* **差异化路径**:普通人可以通过“教学+服务”切入,例如提供个人部署教学(Lobsterfarm)或知识付费社群(AI MONEY GROUP)。关键在于自己必须先搞懂OpenClaw,提供真正的价值,而非简单“割韭菜”。
### 二、 OpenClaw 营收Top30 榜单(2026年3月)
**统计口径**:近30天Stripe验证美元营收;核心业态为部署/托管/硬件/模板/垂直行业。
| 排名 | 项目名称 | 营收 (美元) | 核心业务 |
| :---: | :--- | :---: | :--- |
| **1** | **ClawMart** | **$69,000** | AI配置模板市场 (卖铲子的代表) |
| **2** | **Roofclaw** | **$50,000** | 预装OpenClaw的苹果设备 (卖铲子的代表) |
| **3** | **OpenClaw Pro** | **$49,527** | 一键云部署+IM接入 (卖铲子的代表) |
| **4** | **Donely** | **$44,000** | 云端托管+WhatsApp接入 (卖铲子的代表) |
| **5** | **SetupClaw** | **$36,568** | 高管团队上门/远程部署 (卖铲子的代表) |
| 6 | AI MONEY GROUP | $22,000 | OpenClaw变现课程+付费社群 |
| 7 | StartClaw | $12,000 | AI生产力追踪与任务管理 |
| 8 | Quick Claw | $8,800 | 手机30秒极速部署 |
| 9 | OpenClaw Kit | $8,000 | 封装工具,快速输出成品Agent |
| 10 | ClawWrapper | $7,200 | 快速部署封装层 |
| 11 | ClawHost | $6,800 | 专属服务器托管 |
| 12 | EasyClaw | $6,500 | 小白友好型一键安装 |
| 13 | AtomicBot.aj | $6,200 | 轻量Agent自动化脚本市场 |
| 14 | LarryBrain | $5,900 | 个人AI助理定制 |
| 15 | WorkAny Bot | $5,600 | 跨设备协同,办公流程自动化 |
| 16 | Clawhosters.com | $5,300 | 多节点全球托管 |
| 17 | ClawdHost | $5,000 | Clawdbot专属托管 |
| 18 | Clawcti | $4,700 | 安全加固与权限管控 (安全赛道) |
| 19 | Keepsake | $4,400 | Agent行为记录与复盘 |
| 20 | ClawSimple | $4,100 | 极简部署,无代码操作面板 |
| 21 | Lobsterfarm | $3,800 | 个人部署教学+一对一指导 (普通人切入点) |
| 22 | ClawDrift | $3,500 | 部署流量分发,多账号管理 |
| 23 | Bookedin | $3,200 | 无代码AI接待员,跨端适配 |
| 24 | BiClaw | $2,900 | 独立电商专属,Shopify数据同步 |
| 25 | PostClaw | $2,600 | 13社交平台一键分发 |
| 26 | SAM | $2,300 | 游艇运营垂直Agent (垂直赛道) |
| 27 | ZeroRules | $2,000 | 本地拦截冗余请求,Token优化 (成本管控) |
| 28 | Clawwatcher | $1,700 | Token消耗实时监控 (成本管控) |
| 29 | Koi Security | $1,400 | 恶意技能包检测,API密钥防护 |
| 30 | Snyk Claw | $1,100 | OpenClaw插件安全扫描 (安全赛道) |
|
|
|
|
|
|
|
AI记事·2025
大模型全球范围内的竞争日益激烈,
2025年,OpenAI、谷歌、微软、Meta等科技巨头继续在大模型领域投入巨资,争夺市场份额。
国内方面,百度、阿里巴巴、腾讯、华为等公司加速大模型研发,推出了多款具有竞争力的产品。
其中,deepseek在2025年之初推出了基于长文本的LLM,在处理长文本输入方面表现出色,且成本大降,成为行业关注的焦点。
从此以后,从事LLM行业的技术人员,每到过年就加班加点为大版本的发布做准备...
|
|
|
|
|
|
|
|
|
|
|
|
|
AI记事·2024
|
TOP5职位 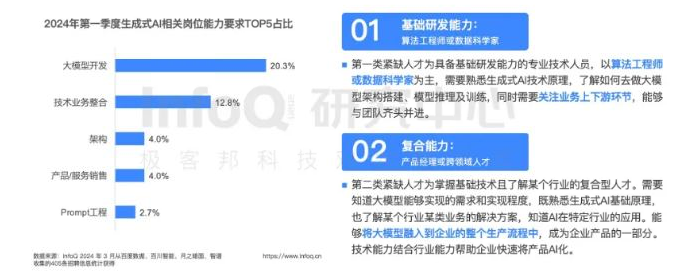
开发者的多元战场 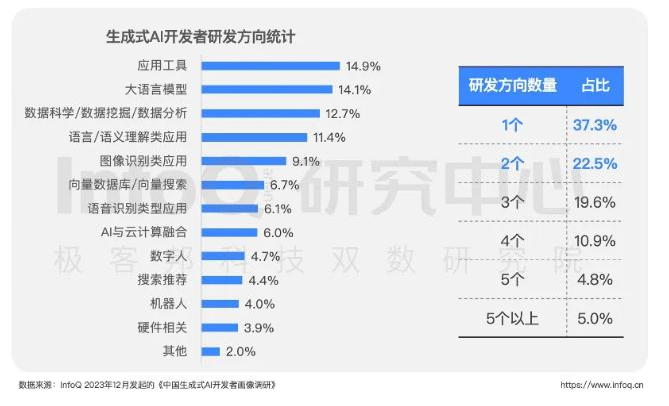
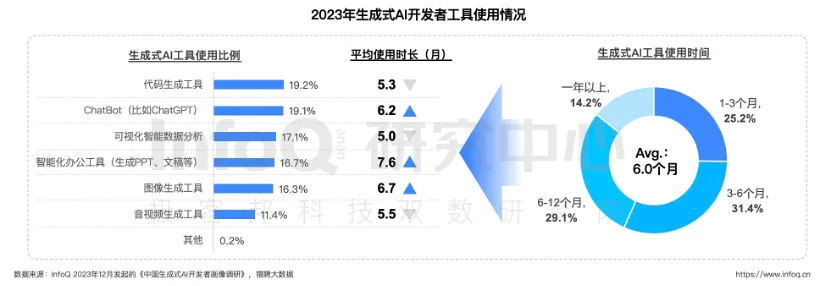
大模型使用占比
AI 研发团队的构建,是一门艺术。 目前,小而美的团队成为主流,他们灵活、高效,专注于应用层的创新。 团队成员不仅要懂得场景、开发,更要精通大模型。 而团队领导者,往往是拥有世界顶级名校背景和科技巨头企业经验的行业精英。 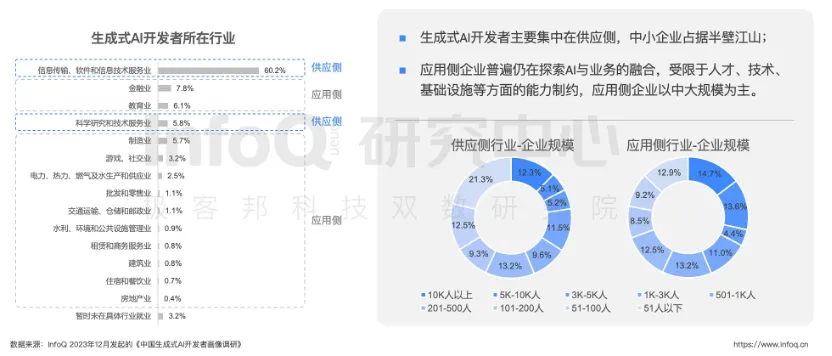
|
特斯拉大裁员后的豪赌,FSD v12 是如何诞生的|TECH TUESDAY
https://mp.weixin.qq.com/s/KOE1aayXscZ4P6ozt8-8bQ
裁员 1 万多人、大幅缩减重要项目 4680 电池团队、负责三电系统的高级副总裁等高管离职……特斯拉 CEO 埃隆·马斯克在 4 月 15 日发起的大调整,只是一个序幕。
之后半个月,特斯拉持续裁撤曾经的重点项目:4680 电池项目继续裁员、北美的超级充电桩团队完全解散、9000 吨以上一体压铸机项目被叫停,相关高管大批离职。接下来的 6 月,特斯拉还会在加州和得州两地裁员超过 6000 人。
马斯克的新赌注是全自动驾驶。无人出租车(Robotaxi)项目被拔到最高优先级。马斯克宣布将在 8 月 8 日发布产品,今年投入百亿美元采购 GPU、研发车载芯片,用于改进自动驾驶系统。他曾多次说过,只要持续迭代这套系统,就会实现无人驾驶,让特斯拉成为 10 万亿美元市值公司。
在特斯拉的第二大市场中国,马斯克也期望用这套系统翻盘。4 月底,马斯克到访中国,被政府领导接见。不久后,他在内部信中说,特斯拉已在中国获得测试部分辅助驾驶系统的许可。
今年开始大面积推送的 FSD v12 自动驾驶系统确实展现出一些不同寻常的潜力。车主的反馈都很接近:“就像人开车一样”,跟上一代相比有进步,狭路会车、超车更从容。
100亿美元以上的投资 一家国内一线新能源企业负责人体验后相信,特斯拉的自动驾驶会有革命性突破。竞争对手们不敢错过,仅 4 月底北京车展前后,小鹏、华为、长城、商汤绝影等公司宣布将推出类似 FSD v12 的自动驾驶系统。同期,软银、英伟达和微软用 10.8 亿美元投资与特斯拉路线相同的英国自动驾驶公司 Wayve。 沿着特斯拉的路线,一场新的自动驾驶竞赛正在开启。这一次不只要解决技术难题,还是一场资源竞赛。来中国当天,马斯克在社交媒体上划出入局门槛:“任何公司,如果算力投入达不到百亿美元 ...... 就无法参与这一轮竞争。” 原理:砍掉 30 万行代码,让数据决定车怎么开
2000 年代,DARPA 在沙漠中举办的 3 场无人车挑战赛,是现代无人驾驶技术研发的源头。Google 招揽了优胜者,趟出一条可行的方案,将自动驾驶拆成多个环节:
用激光雷达、摄像头等传感器收集车辆周围环境数据,交给依赖人工标注数据训练出的模型,
识别出常见的重要目标和各种障碍物(感知模块),
再配合高精地图,让系统了解道路会怎么变化,
最后依赖工程师用代码写成的规则决定车怎么开(预测、规划模块)。
推出 v12 前,特斯拉的自动驾驶系统工作流程大概是:
负责感知的视觉模块先工作,处理摄像头等传感器捕捉的路况数据,识别出路上有什么东西,大概怎么分布,哪些是动的,哪些是不动的,哪些是车道线,可以行车的区域有哪些等等。
然后是预测规划控制模块,调用感知模型处理过的信息,预测场景中人、车等动态目标接下来几秒如何行动,结合模型和工程师提前写入的规则,规划安全的行驶路线,再控制方向盘、加速或刹车踏板,照路线行驶。
为了尽可能应对路上遇到的各种情况,特斯拉数百名工程师写了 30 万行 C++ 代码制定规则——相当于早期 Linux 操作系统代码量的 1.7 倍。
这不是人学会开车的方式,人不需要认出一条路上可能出现的大量物体到底是什么,也不需要为每个复杂场景提前制定各种规则,就能开车上路。
特斯拉 FSD v12 学开车更像人。最大的改变是用了 “端到端” 架构:一端输入摄像头等传感器获得的数据,另一端直接输出车该怎么开。
训练这套系统时,机器从大量车辆行驶视频和人类司机在不同环境下打方向盘、踩加速踏板的数据中学习怎么开车。
在 FSD v12 中,特斯拉工程师们写的规则几乎全被消灭,30 万行规则代码仅剩 2000 多行,不到原来的 1%。
端到端自动驾驶系统学开车的方式,也只是有一点像人,并没有系统能像人类一样真的理解世界。所以人学几天,就能开车上路安全驾驶,但 FSD 要看海量的视频学习。马斯克去年在一次财报会上谈到数据有多重要:“用 100 万个视频 case 训练,勉强够用;200 万个,稍好一些;300 万个,就会感到 Wow;到了 1000 万个,就变得难以置信了。”
基础:最难的几年依然坚持预装硬件、研发芯片、采集数据 2018 年初,特斯拉深陷产能危机、面临生死考验时,马斯克发邮件给 OpenAI 管理层,希望 OpenAI 并入特斯拉,共同研发 “基于大规模神经网络训练的全自动驾驶方案”。 他认为,AI 研发需要巨资,而 OpenAI 需要建立盈利模式才能与巨头抗衡。而特斯拉已经用 Model 3 和其供应链打造了火箭的 “第一级”,如果 OpenAI 能够并入特斯拉,将会加速无人驾驶研发,打造火箭的 “第二级”,特斯拉会因此卖出更多车,OpenAI 也会有足够的收入开展人工智能研究。 马斯克的提议被拒绝,最后退出 OpenAI 董事会。但在此之前,他就已经从 OpenAI 挖来安德烈·卡帕蒂(Andrej Karpathy),负责自动驾驶技术研发,带队训练效果更强的模型。 多位自动驾驶从业者认为,卡帕蒂加入特斯拉是其研发 v12 版端到端自动驾驶模型的开端。 1986 年出生的卡帕蒂,是过去十多年人工智能浪潮的亲历者,也是从中成长起来的人工智能科学家。 他 2011 在斯坦福大学读博士期间和导师李飞飞一起完善催生 AlexNet 的 ImageNet 竞赛数据集, 在各个学术会议上发表数篇计算机视觉论文,在斯坦福大学开设了第一门深度学习课。 博士毕业后,他是最早一批加入 OpenAI 的人。 2017 年 11 月,卡帕蒂发布著名的《软件 2.0》 文章,称 “软件吞噬世界,而人工智能为基础的软件 2.0 正在吞噬软件”。那时经过大量数据训练的计算机视觉模型,识别物体的准确率超过人眼。AlphaGo 从数据中学到了击败人类围棋冠军的方法。 他相信,靠着大量数据,人工智能在大部分有价值的垂直领域,“至少在涉及图像 / 视频和声音 / 语音的领域,比你我能想出的任何代码都要好。” 在卡帕蒂到来前,特斯拉已经完成了自动驾驶的数据基建。 用大量数据训练更强的模型,是非常适合特斯拉的技术发展路线。 用大量数据训练更强的模型,是非常适合特斯拉的技术发展路线。 但特斯拉要投入大量资源研发自动驾驶技术,马斯克从不缺乏冒险的决心。 2016 年开始,每一辆出厂的特斯拉汽车都搭载能运行 Autopilot 辅助驾驶系统的硬件, 花钱买了软件才能开启功能。 到现在也没几个汽车品牌会这么做,更常见的做法是把同一款车分成不同的版本, 把搭载自动驾驶硬件车型卖给感兴趣的客户。 标配辅助驾驶的时候,特斯拉启用 “影子模式”(Shadow Mode), 就算驾驶员不购买 Autopilot 功能, 这套系统也会在后台运行,记录行车数据、规划行车路线。 马斯克当时接受采访说,它的作用是证明系统比人可靠,为监管机构批准技术提供数据支撑。 卡帕蒂加入后,影子模式成为特斯拉获得训练模型数据的核心来源—— 当系统选择的路线与驾驶员的选择有明显偏差时,就会触发数据回传机制, 系统会自动记录摄像头捕捉到的数据、车辆行驶数据等,等到连接 WiFi 后上传到特斯拉的服务器中。 到 2018 年底,特斯拉就靠这套系统采集 16 亿公里数据,超过现在绝大多数研发自动驾驶技术的车企。 特斯拉的自动驾驶团队把大部分精力放到数据上,搭建了一套数据处理系统,专门分析、筛选收集到的数据,一开始用人、后来绝大部分数据用机器打标签,然后喂给模型,持续改进自动驾驶系统。为了用大量数据训练模型,特斯拉在 2019 年之前,就采购大量 GPU 建设名为 Dojo 的算力中心,并持续扩大,到现在已经积累了等同 3.5 万张 H100 的算力。 摄像头替换激光雷达,并加入高度维度,实现3D识别 HydraNet 用微软亚洲研究院 2015 年发布的 ResNet 模型当主干,提取车身周边 8 个摄像头所捕捉画面的通用特征,交给不同的算法分支完成不同的任务。这么做可以避免用不同的模型重复从相同的画面提取特征,节省算力。 这是当时学术界和多数开发大型计算机识别系统公司的选择,特斯拉把它做得规模更大,并实现工程化。但这么做有局限。HydraNet 只能从不同角度的摄像头捕捉的画面中各自提取信息,摄像头可能只会捕捉到周边物体的一部分。就像新手司机很难靠后视镜流畅倒车入库一样,自动驾驶系统也很难靠它实现真正的无人驾驶,还得靠各种雷达、高精地图辅助。 不用激光雷达的卡帕蒂团队选择使用一系列算法,将 8 个不同方向的摄像头收集的画面拼成一个 360° 的鸟瞰图(Bird's Eye View,即 BEV)模式,再让模型 “理解世界”,规划行车路线。但想让这套系统效果良好,得尽量保证地面是平的,而且车周围环境要简单,否则系统就难以准确理解不同摄像头看到的图片之间有什么关联。 “当我们用它实现 FSD 时,很快发现达不到预想中的效果。” 安德烈·卡帕蒂在 2021 年特斯拉 AI Day 上说,他介绍了用 Transformer 架构开发的新版模型,能准确地把跨越多个相机的目标拼得更准确、稳定。 而且利用 Transformer 架构做成的模型,输出的信息可以直接用到后续的预测规划模块,也为 FSD v12 做成端到端模型打下基础。 与新模型配合,卡帕蒂还分享了一个名叫 “Spatial RNN” 的架构,用视频训练模型时,模型能获得短暂的 “记忆” 能力,理解周围的场景如何随着时间变化,从而具备脑补摄像头视野盲区、实时构建局部地图的能力。 这次技术迭代,让特斯拉的辅助驾驶系统不用高精地图也能把车开好,再一次推高自动驾驶的能力上限,向人眼靠近。 等到 2022 年特斯拉 AI Day 举办时,卡帕蒂已经离开特斯拉。特斯拉的自动驾驶系统继续迭代,继任者阿肖克·埃卢斯瓦米(Ashok Elluswamy)介绍了 “占用网络”(Occupancy Network),在 Transformer 架构基础上引入 “高度” 要素,能把不同角度摄像头捕捉到的画面还原成 3D 场景,计算出一个物体在空间中占用多少点,从而推断出它的形状。 借助 Occupancy Network,特斯拉的自动驾驶系统不用激光雷达,只靠摄像头收集信息,就可以识别出它没有见过的障碍物,被视为 “纯视觉方案” 的胜利。 特斯拉多年研发,终于实现马斯克多年前提出的第一个要求:人靠双眼就可以识别、还原 3D 环境,车靠摄像头也应该可以。 然而,尽管多名重要的技术高管选择离职,但OpenAI 的业务仍在继续增长。 据报道,OpenAI在2023年的年度经常性收入(ARR)已达到20亿美元,同比增长超过4500%,使OpenAI跻身包括谷歌和 Meta 在内的少数硅谷公司之列,即在成立后的10年内实现超10亿美元收入。 目前,OpenAI公司估值超过800亿美元。 就在北京时间2月14日凌晨,OpenAI宣布,本周将面向一小批 ChatGPT 免费版的用户和Plus付费版用户测试一项关于“记忆算法”的新功能——在与 ChatGPT 聊天时,用户可以要求它记住特定的内容,或是让它自行获取详细信息,用得越多,ChatGPT的记忆力就会越好。 OpenAI 表示,他们将很快公布向更大众群体用户推出上述新功能的计划。最初将有数以万计的用户“尝鲜”该功能,而团队希望先得到首批用户的使用反馈,并进行技术改进。 |
AI教母李飞飞创业首秀,“空间智能”需要哪些能力 https://mp.weixin.qq.com/s/UuuJw-aMW9Stk7DXQKsEwg 目的在于让AI理解三维物理规律... 被称为数智领域内的革命 让机器向人靠拢,机器研发方向... - 5G+传感器+AI自动化,这个AI更加追求可解释性,更多的是基于规则... - 优点:精准,不会产生幻觉 - 缺点:投入高 - 所有空间数据来自于传感器 - 训练+自学习 - 部分空间数据由推理得到,不全来自于传感器 数智时代,获取温度,土壤,温度等信息 - 植入温度,湿度传感器 - 观察地表的颜色,潮湿与干涸的地表颜色是不一样的,这是靠经验与推理 效率,成本,可靠性,稳定性,容错能力 李飞飞对“空间智能”的描述,是从物体之间的关系中获得预测和洞察力的能力, 涉及的算法能合理推断出图像和文字在三维环境中的样子,并根据这些预测采取行动。 而人工智能对“空间智能”理解的进步,正在催化机器人学习, 让我们更接近一个人工智能不仅可以看到、创造,还与周围的物理世界互动的世界。 为了帮助观众理解“空间智能”,李飞飞在演讲中展示了一张“猫咪伸出爪子试图把玻璃杯推向桌子边缘”的照片。 她解释,人类大脑在瞬间可以评估玻璃杯的几何形状, 在三维世界的位置,与桌子、猫咪和其他物体的关系,并预测接下来会发生什么,采取行动制止。 在“空间智能”的驱动下,大自然创造了视觉与行为的良性循环。 李飞飞的团队教计算机如何在三维世界中行动,如利用大型语言模型让机械臂执行任务, 根据口头指令开门和制作三明治,这就是“空间智能”。 空间计算——空间智能的底座:点云 空间智能的目标不是抽象出对场景的理解,而是不断捕捉正确的信息,并正确地表示信息, 以实现实时解释和行动。空间智能考验的是多领域软硬件的综合能力。 空间计算是使人类能够在三维空间与计算机交互的一组技术, 包括三维重建、空间感知、用户感知、空间数据管理等所有使人类、 虚拟生物或机器人在真实或虚拟世界中移动的软、硬件技术, 侧重对现实世界的三维空间信息的获取、处理、分析和理解。 空间计算硬件功能的提升,能带来更为身临其境和交互式的数字体验。 空间计算的基础是设备能使用实时3D渲染在三维空间生成虚拟对象, 通过摄像头计算机视觉或激光雷达技术,实时扫描周围环境, 计算它们在空间中的位置,空间跟踪生成唯一参考点的 点云, 通过控制器输入、手部跟踪输入和眼动跟踪输入等,实现数字内容的沉浸式自然交互。 2024年英伟达GTC开发者大会的炉边谈话中,李飞飞提到: “用大数据进行扩展时,我想看到的是结构化建模,或着说偏向于三维感知和结构的模型与大数据相结合”。 建模世界物体存在局限性,“空间智能”需要基于世界数据、多模态数据的人工智能模型架构, 应对复杂多变的物体识别、场景感知等挑战。 模型需要大量高质量标注数据进行训练,对各种噪声、遮挡等情况保持鲁棒避免误识别, 进行图像、文本等多模态学习等。 帝国理工学院计算机系机器人视觉教授安德鲁J·戴维森在论文中提到, 空间智能通过训练一个RNN(递归神经网络)或类似网络, 从实时输入的数据中顺序产生有用输出, 要求它在其内部状态内捕获一组持续的概念,这些概念必须与周围环境的形状和质量密切相关。 空间智能高效的关键,在于所需算法中识别计算和数据移动的图数据结构, 并尽可能地利用或设计具有相同属性的处理硬件,尽量减少架构周围的数据移动。 空间智能要走增量式进化路线,需要在AI设计中增加自由度。 未来空间智能系统设计需要考虑六个方面。 第一,需要包含一个或多个摄像头及辅助传感器, 与嵌入式移动实体(如机器人或增强现实系统)中的小型低功耗封装的处理架构紧密集成。 第二,实时系统需使用几何和语义信息维护和更新世界模型, 并根据板载传感器测量估算其在模型中的位置。 第三,理想状态下,系统要为环境中所有对象的身份、位置、形状和运动提供完整的语义模型。 第四,模型的表示要接近度量标准,以便快速推理预测系统感兴趣的内容。 第五,专注保留几何和语义的最高质量,即当前观察到的场景及近期交互, 其余部分存储在低质量级别的层次结构,在重新访问时快速升级。 第六,每个输入的视觉数据会自动根据预测场景进行跟踪检查,及时响应其环境变化。 |
|
|
|
|
AI记事
2012:深度学习时代的小分水领 2012年AlexNet通过ImageNet比赛大放光彩,同时也开启了GPU时代; 此时,AlexNet的作者,已在这条路上走了50年了,熬过了至少两个人工智能的寒冰时代。 2014 Jupyter Notebook源于2014年的ipython项目,是一个非盈利的开源项目,旨在开发跨几十种编程语言的开源软件、开放标准和用于交互式计算的服务。它是一款程序员和科学工作者的编程、文档、笔记、展示软件,因为兼容多种编程语言,具有共享笔记、交互式输出、大数据整合的特点而被广泛使用。 2015:深度学习时代的中分水领 resnet论文解决了深度学习多层网络梯度消失的问题,从而让网络的层次从个位数达到上千,大大增强了神经网络的能力 同年,注意力机制论文现世,transformer诞生,这为大模型的出现埋下的伏笔 TensorFlow,由Google在2015年11月9日发布的,其旨在提供一套完整的机器学习和深度学习框架,支持多种编程语言,包括Python、C++、Go、Java等 2016 PyTorch的前身是Torch,其底层和设计理念追求最少的封装,让用户尽可能地专注于实现自己的想法。PyTorch的初始版本于2016年9月由Adam Paszke、Sam Gross、Soumith Chintala等人创建,并于2017年在GitHub上开源 2017 2017年11月前后,谷歌的AutoML项目发展出新的神经网络拓扑结构,创建了NASNet,这是一个针对ImageNet和COCO优化的系统。 据Google称,NASNet的性能超过了以前发布的所有ImageNet性能。 [1]
AI考证
标准名称:人工智能训练师 国家职业编号:4-04-05-05 职业内容:使用智能训练软件, 在人工智能产品实际使用过程中进行 数据库管理、 算法参数设置、 人机交互设计、 性能测试跟踪及其他辅助作业的人员。 |
|
|
|
|
|
|
|
|
|
|
|
|
|
参考